

Разнообразие моделей полётных контроллеров, которые предлагают производители, настолько велико, что может сбить с толку не только новичка, но и более опытного любителя. Цель этой статьи — объяснить основные термины, рассказать о параметрах, помочь разобраться в спецификациях и выборе подходящего полётного контроллера для квадрокоптера, FPV-дрона или гоночного беспилотного летательного аппарата.
Если вы новичок и только начинаете интересоваться темой, обязательно почитайте о том, как устроен квадрокоптер.
Содержание:
- Что такое полётный контроллер
- Прошивки для бортового компьютера
- Соображения в выборе мини-квадроцикла FC
- Процессор
- Гироскоп
- Выбор полётного контроллера
- На что обратить внимание
Что такое полётный контроллер
Полётный контроллер, известный также под сокращением FC — это мозг беспилотного летательного аппарата, его бортовой компьютер, управляющий всеми остальными узлами и агрегатами дрона. Он представляет собой небольшую печатную плату с установленным на ней микропроцессором. Кроме процессора, контроллер обычно имеет набор встроенных датчиков, реагирующих на изменения положения квадрокоптера в пространстве.
Для того чтобы удерживать дрон в воздухе, сохранять устойчивое равновесие и менять скорость и направление движения по требованию пилота, полётный контроллер принимает команды от бортового радиоприёмника и управляет двигателями. Это делается посредством специальных электронных регуляторов скорости ESC, которые изменяют силу тока, потребляемого моторами, в соответствии с цифровыми сигналами от FC.
Почти все полётные контроллеры содержат в себе встроенный контроль за перемещением на основе гироскопа и акселерометра. Кроме того, некоторые FC могут оснащаться более продвинутыми датчиками, например, барометрическим измерителем давления или магнитометром (компасом).
Полётный контроллер служит концентратором, к которому подключают другие периферийные устройства, применяемые в квадрокоптерах, такие как приёмник системы спутниковой навигации GPS, сигнальные светодиоды бортовых огней LED или ультразвуковые датчики для обнаружения препятствий.
Технологическая база бортовых компьютеров для квадрокоптеров стремительно развивается. С каждым днём они становятся все легче и компактнее, используя более мощные процессоры и аппаратные решения, приобретая больше интегрированных функций, которые не были доступны раньше.
Прошивки для полётных контроллеров
Помимо различий в аппаратном обеспечении и схемотехнике, полётные контроллеры могут использовать множество вариантов прошивок, каждая из которых предназначена для своей конкретной цели.

Современное программное обеспечение, предназначенное для загрузки в полётный контроллер квадрокоптера, может быть сконфигурировано с помощью компьютера или смартфона. Тюнинг прошивки — это термин, который часто применяется любителями квадрокоптеров. Он означает процесс изменения настроек PID, порогов чувствительности и других параметров конфигурации, влияющих на лётные характеристики и управляемость беспилотника. Графический интерфейс и варианты регулируемых параметров могут отличаются от версии к версии, поэтому для каждой из них требуется некоторое время на изучение.
Существует целый список популярных прошивок полётных контроллеров для квадрокоптеров. Каждая из них имеет свои особенности, преимущества и недостатки, хорошо известные профессиональным пилотам и позволяющие добиваться рекордных результатов на соревнованиях. Для начинающих все это не слишком важно. Если нет чёткого понимания, какой именно из вариантов выбрать, можно рекомендовать последние прошивки Betaflight, Raceflight или KISS. Они имеют примерно одинаковые лётные характеристики и можно совершенно не сомневаться, применяя любую из них.
После того как определились с подходящим вариантом программного обеспечения, нужно посмотреть, какие именно платы полётных контроллеров с ним совместимы.
Соображения по выбору FC
Большинство моделей, особенно одинаковой ценовой категории, имеют сходные характеристики, но есть различные соображения, которые могут повлиять на выбор. Вот их список:
Процессор
В настоящее время при изготовлении полётных контроллеров для квадрокоптеров используются 4 основных типа процессора, известных под обозначениями F1, F3, F4 и F7. Это не что иное, как версии ядра микроконтроллера STM32. Не вдаваясь в углублённое сравнение деталей, которым посвящена отдельная статья, на данный момент, начинающим можно рекомендовать F3 или F4. Дело в том, что контроллеры на базе процессора STM32-F1 уже исчерпали свои возможности и считаются устаревшими по целому ряду параметров, а сделанные на F7 пока ещё слишком новые и требуется время для их отладки и улучшения.

Датчик IMU — тип гироскопа и шины
Датчик Inertial Measurement Unit (IMU) — модуль измерения инерции, имеющийся практически во всех полётных контроллерах, служит для точной регистрации движения квадрокоптера. Обычно для этого применяются устройства одного из следующих типов:
|
Тип датчика IMU |
Протокол связи |
Эффективная частота выборки гироскопа |
|
MPU 6000 |
SPI, i2c |
8K |
|
MPU 6050 |
I2c |
4K |
|
MPU 6500 |
SPI, i2c |
32K |
|
MPU 9150 |
i2c |
4K |
|
MPU 9250 |
SPI, i2c |
32K |
|
ICM 20602 |
SPI, i2c |
32K |
|
ICM 20689 |
SPI, i2c |
32K |
В таблице приведены основные параметры, которые имеют значение для выбора.
Нужно понимать, что более высокая частота выборки гироскопа не всегда является преимуществом. Как видно из таблицы, многие из перечисленных типов гироскопических датчиков опрашиваются с частотой 32 кГц. Они могут быть более восприимчивы к механическим и электрическим помехам, чем работающие на скоростях 4 или 8 кГц. Самым хорошим выбором для начинающих являются полётные контроллеры с MPU 6000.
Несмотря на более высокую производительность, лучше избегать других типов, которые являются более шумными, несмотря на высокую производительность. Использование мягких монтажных прокладок при установке контроллера помогает снизить шумы, но не всегда это удаётся в полной мере.
SPI и i2c — это различные типы шины передачи данных и протоколов связи, используемых для подключения датчика IMU к процессору. Они оказывают влияние на такие важные параметры, как эффективная частота дискретизации и время цикла контроллера. Предпочтительным вариантом выбора является шина SPI, которая позволяет получить частоту обновления данных гироскопа выше 8 кГц, в то время как I2C имеет предел 4 кГц. По этой причине не желательно применять MPU 6050 и MPU 9150 — они могут быть недостаточно эффективны на гоночном квадрокоптере, имеющем высокую скорость полёта.
Кстати, нужно иметь в виду, что MPU 9150 — это не что иное, как модификация MPU 6050 со встроенным магнитометром AK8975, а MPU 9250 представляет собой модификацию MPU 6500 с тем же самым магнитометром.
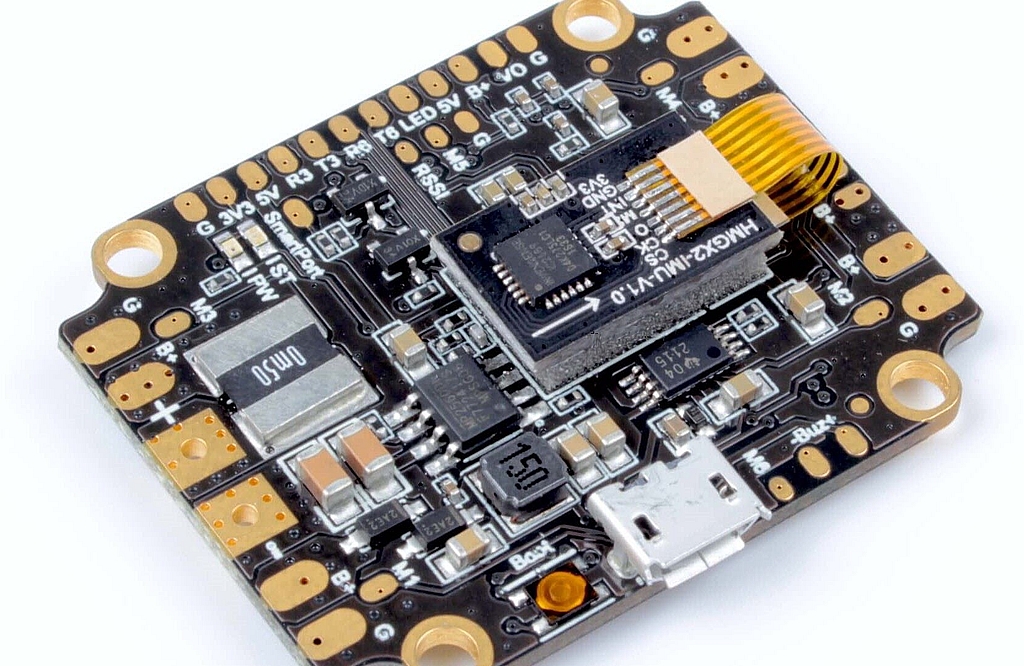
Бывает, что в спецификации продавцы забывают указывать применяемую модель микросхемы IMU. Её несложно узнать самостоятельно, взглянув повнимательнее на плату полётного контроллера. Часто это можно сделать даже по фотографии на сайте поставщика.

Флеш-память и SD-регистратор для чёрного ящика
Встроенная флеш-память используется для хранения данных полётного чёрного ящика, который необходим для настройки и устранения неполадок. Флеш-память более удобна и дешевле в использовании, но данные из неё загружаются очень медленно, а размер от 2 МБ до 16 МБ может ограничить время записи до 3–4 минут полёта.
Многие современные контроллеры имеют встроенную опцию Open Logger, которая позволяет использовать обычные SD-карты для записи данных чёрного ящика. В этом случае карты ёмкостью 2 Гб хватит на нескольких дней полётов.
Если в контроллере нет встроенной флеш-памяти или регистратора на SD-карте, придётся приобрести отдельно внешнее устройство и подключить его через последовательный порт.
Типы разъёмов
Начинающим лучше всего избегать контроллеров с пластиковыми соединительными разъёмами типа JST. Несмотря на то что они позволяют в любой момент, легко и быстро подключить или отключить плату, такая конструкция является значительно менее прочной, чем обычная пайка. При частом использовании могут образоваться микротрещины в монтаже, которые приведут контроллер в негодность.

Очень удобны в использовании металлизированные площадки для пайки, но в случае некачественной платы они легко отламываются даже при небольшом усилии или разрушаются после перегрева припоем. Наиболее практичный вариант — это сквозные отверстия, которые дают возможность делать обычную пайку или использование металлических штифтов.
Встроенный регулятор напряжения
Полетный контроллер со встроенным регулятором напряжения он способен работать непосредственно от аккумулятора LiPo и даже иметь дополнительный выход 5 и 12 вольт для питания других компонентов, например, видеотрансмиттера. Это значит также, что он может самостоятельно производить мониторинг напряжения без дополнительных проводов VBAT.
Интегрированная силовая плата PDB
Если силовая распределительная плата PDB интегрирована непосредственно в полётный контроллер, все регуляторы оборотов ESC и батарея LiPo могут быть подключены к нему напрямую и не требуется никаких дополнительных жгутов проводов. Выигрыш в том, что вместо двух отдельных плат можно обойтись всего лишь одной. Недостатком такого решения является большая сложность монтажа на распаечных колодках, которые обычно имеют небольшой размер и очень ограниченное место для проводов.
Количество портов UART
UART — это аппаратный последовательный порт, который позволяет подключать внешние устройства, такие как OSD модули, Smart Port телеметрию, управление видеотрансмиттером и многое другое.
Количество портов UART зависит от типа процессора, например, полётные контроллеры на базе процессоров STM32 серии F1 обычно имеют по 2 UART, в то время как ядра F3 и F4 могут иметь от 3 до 5. Число последовательных портов самых современных моделей, сделанных на основе микросхем с ядром F7, может достигать 8 или даже более.
Встроенный индикатор тока
Наличие этого несложного датчика может оказать неоценимую помощь. Он гораздо лучше показывает оставшийся заряд батарей, чем уровень напряжения VBAT и позволяет более точно определить время, когда пора идти на посадку. Кроме того, встроенный в полётный контроллер индикатор потребляемого тока — это отличный инструмент для тестирования, полезный на тренировках.
Кнопка аварийного загрузчика
Кнопка загрузчика (boot loader) позволяет при нажатии перевести полётный контроллер в режим загрузчика. Это позволяет форсировать процесс перепрошивки программного обеспечения, если произошёл сбой и нормальная прошивка не работает.

Обычно полётные контроллеры имеют на плате две контактных колодки, которые нужно перемкнуть перед включением питания, чтобы выйти в режим загрузчика. С помощью кнопки загрузки, это намного проще и удобнее делать.
На что ещё обратить внимание
Интегрированный OSD. Каждый, кто имел дело с подключением и настройкой платы MinimOSD, знает, насколько капризна аналоговая микросхема MAX7456, являющаяся её основой. Очень часто она перегорает при монтаже или первом использовании, потому что не любит перегрева и боится резких скачков между цифровой аналоговой и аналоговой «землёй». Если вам нравится использовать OSD, эта функция должна быть по возможности интегрирована в полётный контроллер.
Встроенный видеотрансмиттер. Главное преимущество от использования интегрированного в плату полётного контроллера VTX — это общая экономия веса и компактность. Кроме того, некоторые модели даже позволяют изменять настройки передатчика непосредственно из FC.
Барометр и магнитометр (компас). Оба этих датчика чаще применяются для фристайл-полётов или аэросъёмок и не имеют существенного значения для гоночных квадрокоптеров.
Поддержка разных типов RX. При выборе полётного контроллера нужно убедиться, что он поддерживает протокол радиоприёмника, который вы планируете использовать. Например, это могут быть PWM, PPM, SBUS, Spektrum Satellite и другие.
Исполнение AIO. Варианты полётных контроллеров «все в одном» имеют все необходимые функции, встроенные в одну плату. Как правило, это относится к модулям ESC, PDB, VTX и приёмнику радиоуправления. Это довольно удобно, но недостаток в том, что при выходе из строя одного из модулей придётся заменить всю плату. Стоимость такого ремонта может оказаться в несколько раз выше, чем при замене отдельного компонента. Настройка интегрированного функционала также может оказаться более сложной.
Инфракрасный транспондер. Это функция, позволяющая использовать инфракрасные детекторы напрямую с полётным контроллером. Может оказаться очень полезной для измерения времени круга во время гонок, но применяется не на всех соревнованиях. Если вы планируете летать на трассах, оснащённых таким оборудованием, стоит подумать об ИК-транспондере.