

Эта статья посвящена правильному выбору блока ESC для мультироторных беспилотных летательных аппаратов, предназначенных для гонок в режиме вида от первого лица. Факторы, которые следует при этом учитывать, являются фундаментальными и особенно важны для начинающих интересоваться темой FPV полетов.
ESC — это электронный регулятор скорости. Как следует из названия, он предназначен для контроля оборотов двигателей. Электронный блок ESC получает сигналы для дроссельной заслонки от полетного контроллера и управляет бесколлекторным двигателем, заставляя его вращаться с оптимальной скоростью, обеспечивающей необходимый уровень электрической мощности. От качественной работы регуляторов ESC зависит устойчивость в полете, безопасность и точность управления квадрокоптером.
Содержание:
- Регулируемый ток.
- Тип процессора.
- Используемая прошивка.
- Применяемый протокол ESC.
- Активное торможение и аппаратное обеспечение PWM.
- Размеры и вес.
- Входное напряжение.
- Наличие и отсутствие цепи BEC.
- Контроллеры типа 4-в-1.
- Популярные торговые марки.
- Зависимость тяги от выбора ESC.
- Загрузчик bootloader.
Мощность ESC и сила тока
Первое, на что нужно обратить внимание при выборе электронного регулятора ESC — это его мощность. Она определяется силой коммутируемого прибором тока, измеряемой в амперах. Электродвигатели при вращении всегда потребляют ток. Но если число ампер станет больше, чем способен регулировать ESC, он начинает сильно нагреваться и в конце концов прекращает работать. Это довольно опасно, а в некоторых случаях авария может закончиться даже небольшим пожаром.

Существует три фактора, которые могут серьезно повлиять на увеличение тока и привести к перегрузке ESC контроллера:
- Использование двигателя с более высоким KV по сравнению с обычным.
- Увеличенный размер мотора (диаметр и высота статора).
- Установка тяжелых пропеллеров (диаметр и шаг лопастей).
Эти моменты необходимо учитывать, чтобы избежать серьезных проблем при эксплуатации квадрокоптера.
Существует два различных параметра силы коммутируемого тока, каждый из которых по-своему характеризует контроллер ESC: непрерывный и пиковый или взрывной ток. Непрерывный (номинальный) показывает, какую мощность способен безопасно регулировать контроллер ESC в течение продолжительного времени, а пиковый ток — кратковременно.
Весьма сомнительно, чтобы максимальное положение дроссельной заслонки использовалось течение продолжительных периодов времени. Даже применяемые во время гонок модули ESC обычно рассчитаны на то, чтобы выдерживать более высокую силу тока лишь на коротких промежутках, например,10 секунд. Это и есть пиковый (взрывной) уровень, который обычно указывается в качестве второго параметра.
Иногда начинающие путают смысл понятия номинального тока ESC и принимают его за максимальное число ампер, которые двигатель способен получить от батарей. На самом деле все происходит наоборот. Мощность двигателя определяет проходящий через контроллер ESC ток, поэтому блок регулятора должен быть рассчитан на максимальное число ампер используемого вами мотора.
Очень важно понимать, что нет никакой практической пользы в использовании электронных регуляторов ESC заведомо повышенной мощности. Например, если просто взять и заменить ESC 20A на более мощный 40A ESC, в действительности мы увидим даже снижение производительности, так как квадрокоптер станет намного тяжелее.
Как определить необходимую силу тока
Несложно самостоятельно проверить потребление тока двигателем на специальном настольном стенде с помощью измерителя мощности. В качестве альтернативного метода можно попробовать определить тягу при помощи сервиса, доступного в режиме онлайн. На основании выбранной вами комбинации двигателей и пропеллеров получается итоговое значение.

Еще более простым вариантом являются справочные данные, которые некоторые производители двигателей предоставляют на страницах своих продуктов в сети. Например, если вы планируете использовать 2206 двигатель с пропеллерами 5030 и аккумулятором LiPo 4S, он потребляет ток 10A на полностью открытой дроссельной заслонке (по данным тестов).
Установки регуляторов ESC, рассчитанных на 12 ампер, должно быть более чем достаточно для двигателей 2206, но если применить с ним в комплекте более тяжелые пропеллеры размера 6045, максимальная потребляемая мощность может достигать 20А. В этом случае будет значительно безопаснее использовать ESC с номинальным током 20A.
В любом случае небольшой запас на погрешность никогда не будет лишним, но не нужно терять чувства меры и выходить за рамки разумного. Можно использовать ESC мощностью 30A или даже 40A с двигателями, которые потребляют ток лишь 20A, но они будут слишком велики по размеру, добавят лишний вес и стоимость, потому что более мощные контроллеры ESC всегда дороже.
Тяга и потребление тока в тестах превосходят реальные

Следует иметь в виду, что большинство статических измерений с высокой вероятностью показывают более высокую тягу силу тока, чем можно ожидать в условиях реального полета. Есть две причины:
- Прежде всего, погрешность связана с тем, что ПИД-регуляторы полетных контроллеров всегда стремятся оставить немного запаса мощности, чтобы стабилизировать летательный аппарат. Так что на самом деле практически невозможно увидеть открытую на 100% дроссельную заслонку.
- При движении «на открытом воздухе», двигателям не нужно работать с такой же силой, как на стенде в помещении. За счет этого уменьшается и сила тока.
Так обстоит в теории. На практике, чтобы проверить эти предположения, можно использовать для теста самое обычное экранное меню (OSD), которое непрерывно сообщает об общей токовой нагрузке во время полета.
Например, если взять моторы DYS Storm 2207 2500 kv с трехлопастными пропеллерами DAL Cyclones 5045, статический тест тяги этого комплекта показывает около 30 А при полностью открытой дроссельной заслонке. Но в условиях реального полета самый высокий постоянный ток не превышает 22–24 А. Если взять другие сочетания двигателей и пропеллеров, то конкретные цифры будут отличаться, но общая картина останется неизменной.
Кроме того, стиль управления квадрокоптером у каждого человека отличается. В этом случае, если пилот не очень часто открывает полный дроссель, общий ток будет еще ниже.
Используемые прошивки
Контроллер ESC — это микропроцессорное устройство, работа которого напрямую зависит от особенностей программного обеспечения. Изначально, еще на заре появления квадрокоптеров, параллельно развивалось две различных концепции создания софта для загрузки в регуляторы ESC — разработка проприетарного программного обеспечения, права на которое принадлежат компании-изготовителю оборудования и программы с открытым исходным кодом.
Как правило, проприетарные прошивки больше оптимизированы под конкретные изделия, но софт с открытым исходным кодом чаще обновляется, совершенно бесплатен и намного более универсален. Для правильного выбора прошивки имеют значение ее технические особенности, которые обычно не связаны с принципом лицензирования.
1. Прошивки SimonK и BLHeli
Две из старейших прошивок контроллеров ESC для мультироторов — это SimonK и BLHeli. С самого начала они были с открытым исходным кодом, так как созданы и поддерживаются любителями RC. В прежние времена программное обеспечение, написанное производителями регуляторов ESC, было не слишком качественным и далеко не оптимальными, поэтому многие любители предпочитали прошивать либо SimonK, либо BLHeli в свои устройства. Постепенно они стали фактическим стандартом для прошивки большинства контроллеров. Основная часть новых ESC теперь выпускаются с предустановленной прошивкой BLHeli либо с SimonK.
Большинство пользователей выбирают BLHeli из-за большого диапазона доступных функций и более удобного интерфейса. Кроме того, считается, что программное обеспечение SimonK сегодня несколько устарело, потому что больше не обновляется.
Чтобы более корректно оценить преимущества прошивки BLHeli в сравнении с SimonK, нужно описывать их более детально, но для начинающих имеет смысл выбирать BLHeli всегда, когда есть такая возможность.
2. Прошивка BLHeli_S
Программное обеспечение BLHeli_S — это второе поколение популярной прошивки BLHeli, разработанное специально для контроллеров ESC на основе процессора Busybee с поддержкой аппаратного PWM. Оно имеет гораздо более упрощенный пользовательский интерфейс по сравнению к классическим BLHeli. Серии регуляторов Aikon SEFM 30A и DYS XS являются первыми приборами, в которых стали применять обновленную версию прошивки BLHeli_S.
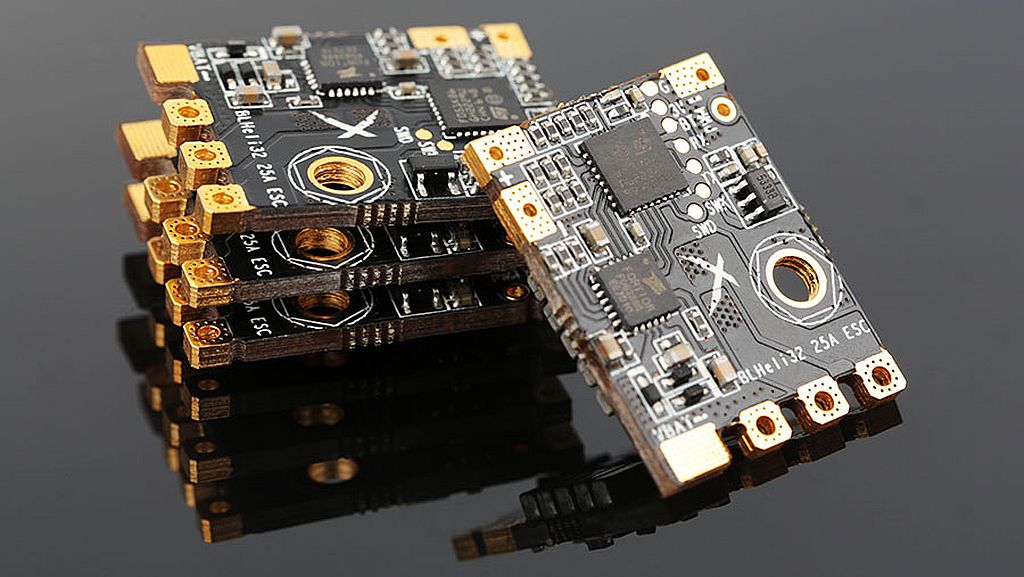
3. Прошивка BLHeli_32 для 32-разрядных ESC
Прошивка BLHeli_32 — это третье и самое последнее поколение программного обеспечения BLHeli. Оно написано специально для 32-разрядных ESC и в отличие от двух предыдущих имеет закрытый исходный код. Более мощные процессоры обеспечивают более плавную, точную и надежную работу, чем предыдущее поколение 8-битовых чипов, используемых в контроллерах.
4. Прошивка KISS
Прошивка KISS закрыта для свободных модификаций сообществом любителей RC и предназначена исключительно для регуляторов скорости, выпускаемых под брендом KISS.
Процессоры ATMEL, SILABS и ARM Cortex
Существует три основных семейства процессоров (микроконтроллеров или MCU) о которых нужно знать, если вы интересуетесь регуляторами ESC для квадрокоптеров. В настоящее время в большинстве контроллеров двигателей используются процессоры Atmel, Silabs и ARM Cortex.
Все упомянутые MCU имеют отличающиеся друг от друга спецификации и наборы функции, позволяющие загружать в них различное firmware:
- ATMEL — микропроцессоры для контроллеров ESC с разрядностью 8 бит, поддерживающие как прошивки SimonK, так и BLHeli.
- SILABS — 8-разрядные MCU, которые могут работать только BLHeli или BLHeli_S.
- Atmel ARM Cortex 32-бит (более точное название STM32 F0) — микропроцессоры, работающие под управлением BLHeli_32.
ATMEL 8-разрядные контроллеры ESC были самыми распространёнными до того момента, как на рынке стали доминировать устройства с процессорами SILABS. Они превосходят по эффективности регуляторы на основе ATMEL, за исключением контролеров KISS. А использование мощных 32-битных MCU ARM Cortex стало обычным явлением только в последнее время, с начала 2017 года.
SILABS F330 и F39X
В числе ESC на базе SiLabs есть устройства на разных процессорах, имеющих отличающуюся друг от друга производительность. Например, два основных, используемых в настоящее время — это F330 и F39X.
Микроконтроллер F330 работает на более низкой тактовой частоте, что может привести к проблемам при использовании с двигателями, имеющими высокий KV. У процессоров F39X эти проблемы отсутствуют. Кроме того, они поддерживают новые протоколы Multishot ESC и Oneshot42.
В качестве примера таких устройств можно привести хорошо зарекомендовавшие себя ESC Littlebee 20 A на F330, имеющий весьма ограниченное применение и контроллер скорости DYS XM20A (F39X), считающийся одним из лучших для небольших высокооборотных двигателей.
Busybee (EFM8BB)
Процессоры Busybee MCU — это обновленные версии MCU F330 и F39X. Как правило, в контроллерах ESC ни их основе, используется прошивка BLHeli_S.
- BusyBee1 — BB1 (EFM8BB10F8)
- BusyBee2 — BB2 (EFM8BB21F16)
Это более современное и перспективное решение. Контроллеры на основе Busybee лучше, потому что вместо использования программной PWM (широтно-импульсной модуляции) в них встроен специальный аппаратный блок, который может генерировать сигнал ШИМ. Он синхронизируется с рабочим циклом процессора, создавая в результате более плавный отклик дроссельной заслонки. Новые ESC также поддерживают последние протоколы D-Shot. Примерами устройств, использующих эти MCU, являются Aikon SEFM 30A и DYS XS 30 A.
Если обобщить сказанное, то общий рейтинг производительности процессоров для контроллеров ESC от лучших к худшим:
- ВВ2
- BB1
- F39X
- F330
- Atmel-8-разрядный
Выбор между 8-битными и 32-битными MCU
Большинство производителей ESC по-прежнему продолжают использовать 8-битные процессоры (F330, F39X, Busybee и другие) в самых популярных линейках своих продуктов. Но с 2016 года начали активно появляться новые 32-разрядные регуляторы ESC на основе STM32, такие как KISS 24A Race Edition, V-Good Firefly и Gemfan Maverick.
Мощные и сравнительно недорогие 32-битные процессоры сделали доступными многие новые функции, которые не раньше были возможны при ограниченной мощности обработки и возможностях обычных 8-битных MCU. Такие режимы, как ESC-телеметрия контроллеров KISS 24A или изменение направления вращения при запуске у модулей Firefly — это лишь некоторые из них.
Семейство протоколов ESC
Выбор рабочего протокола ESC определяет, как быстро сигналы от полетного контроллера могут быть отправлены регулятору скорости. Это довольно сильно влияет на производительность работы квадрокоптера. Исходный и самый старый из ESC-протоколов — это стандартный PWM (широтно-импульсная модуляция). Он имеет задержку исполнения до 2 мсек, в то время как быстрый и современный протокол Multishot сокращает время ожидания всего до 5–25 нсек.
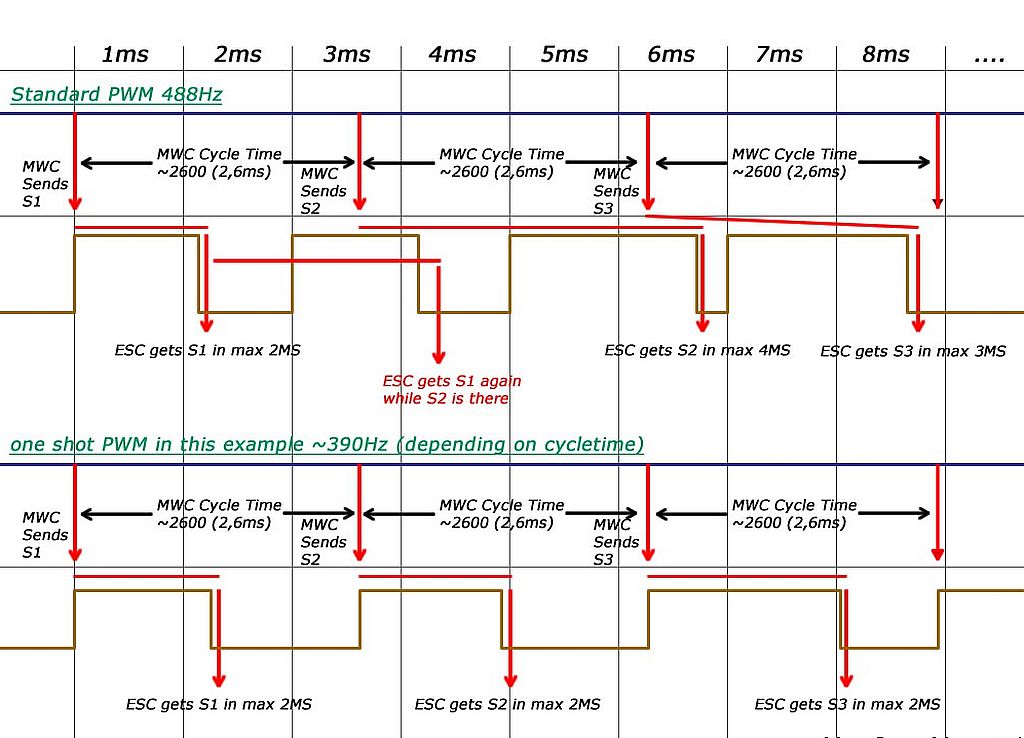
Вот список протоколов, используемых в настоящее время в гоночных квадрокоптерах, от самых старых до самых последних:
- Стандартный ШИМ (обозначается как PWM)
- Oneshot125
- Oneshot42
- Multishot
- DShot (DShot150, DShot300, DShot600, DShot1200)
- ProShot
Не каждый ESC поддерживает все необходимые протоколы, обычно устройство имеет 1-2 доступных режима на выбор. Обязательно убедитесь перед покупкой, что хорошо изучили спецификацию выбранного прибора.
Поддержка активного торможения и аппаратный ШИМ
У контроллеров ESC есть несколько особенностей, которые отличают их друг от друга и заслуживают обязательного упоминания:
- Режим активного торможения, известный как «приглушенный свет», значительно улучшающий отзывчивость квадрокоптера.
- Поддержка аппаратного PWM, которая также повышает плавность и отзывчивость управления, делает квадрокоптер немного более эффективным и снижает шум. Аппаратный ШИМ также обеспечивает более точный контроль скорости в полете.
- Отдельный драйвер EFT, применяемый в лучших современных ESC, повышает эффективность активного торможения. Более дешевые модели регуляторов имеют транзисторы FET, но использование специального драйвера более перспективно.
Размеры и вес
Обычно размеры и вес регуляторов ESC пропорциональны силе коммутируемого ими тока.
Контроллеры скорости, которые предназначены для мини-квадрокоптеров, имеют стандартные размеры и вес. В настоящее время он составляет у лучших моделей от 4 до 6 грамм. С каждым днем становится все труднее сделать ESC меньше и легче, не жертвуя при этом производительностью и охлаждением.
Для гонок, как правило, желательно иметь как можно более легкий квадрокоптер. Но экономия за счет регуляторов ESC — не лучший способ, если требуется сбросить более нескольких граммов. Меньшие по размеру приборы, как правило, нагреваются быстрее и не имеют возможности для нормального охлаждения из-за своих малых размеров, что приводит к опасности перегрева и даже возгорания.
Входное напряжение
Некоторые из регуляторов ESC поддерживают входное напряжение до 6S литий-полимерных аккумуляторов, но большинство рассчитано на работу с 4S батареями. Выбирая контроллер скорости для квадрокоптера, обязательно убедитесь, что этот ESC совместим по напряжению с батареей LiPo, которую вы хотите использовать. Важно, чтобы оно не превышало допустимого уровня.
Наличие или отсутствие цепи ВЕС, OPTO ESC
Некоторые ESC поставляются со встроенной схемой цепи BEC или контроля выключения батареи. Это замысловатое название регулятора напряжения, который преобразует основное напряжение аккумуляторной батареи LiPo, например, 2S (7.4 В), 3S (11.1 В) или 4S (14.8 В) в более низкое 5 В, необходимое для питания полетного контроллера, приемника аппаратуры радиоуправления и других компонентов квадрокоптера.
Контроллеры скорости, не имеющие встроенного BEC, часто называют OPTO ESC. На самом деле, это просто маркетинговый трюк производителей и продавцов. Несмотря на свое название, такие регуляторы ESC фактически могут не использовать оптроны.
Оптрон или оптоизолятор представляет собой полупроводниковый компонент, который передает импульсы электрического тока с использованием света. Он служит развязкой, отделяющей высоковольтную цепь от схемы низкого напряжения и предотвращающей повреждения электроники ESC или вмешательство в сигналы от полетного контроллера при быстрых скачках напряжения.
Регуляторы ESC, у которых нет встроенной цепи BEC, обладают рядом преимуществ. Они легче, меньше по размеру и создают меньше помех, поскольку схема управления двигателем оптически изолирована от радиоприемника и полетного контроллера. Но следует помнить, что без 5 В цепи BEC потребуется отдельный источник питания.
Правильное подключение ESC
Новички, впервые собирающие свой квадрокоптер, часто задаются вопросом о том, как правильно подключить мотор к трем проводам от контроллера ESC.
Все решается очень просто. Можно подключить три провода на одном конце ESC к трем проводам двигателя в любом порядке. Если двигатель вращается в неправильном направлении, достаточно любые два из них. Можно изменить вращение в программе BLHeliSuite, если вы используете эту прошивку, а для владельцев KISS ESC предусмотрены две монтажных колодки на плате.
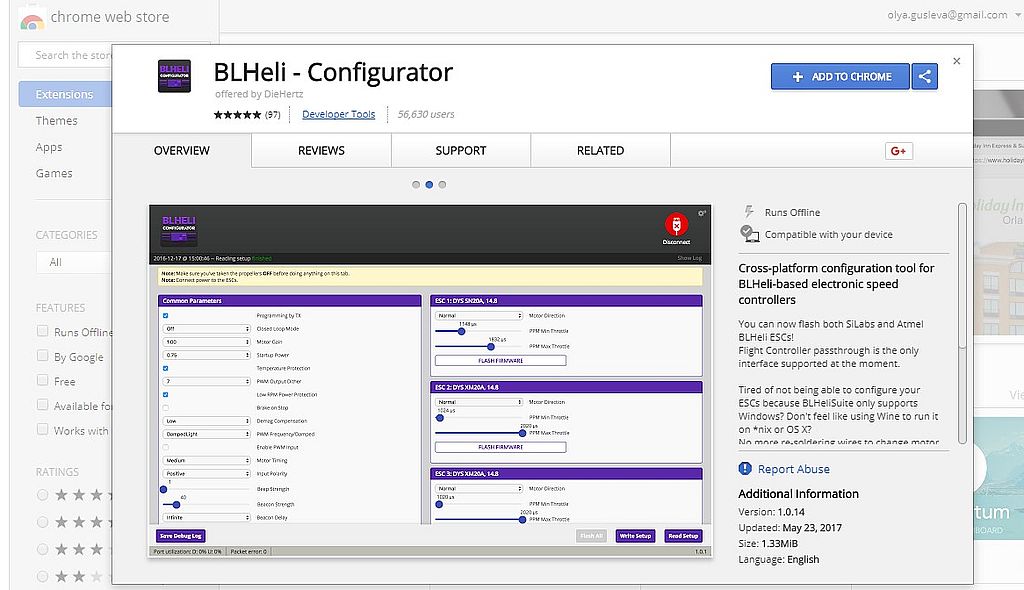
Конфигуратор для прошивки BLHeli
Для владельцев компьютеров под управлением ОС Windows существует специальная программа-конфигуратор BLHeliSuite. К сожалению, она работает только в Windows, а версии для Linux или MacOS не существует. Но есть хорошие новости для пользователей браузера Google Chrome: теперь появилось приложение Chrome APP, называемое BLHeli Configurator, которое можно использовать для записи во флеш-память и настройки контроллеров ESC. Оно работает на любой ОС, если у вас установлен Chrome.
Интегрированные контроллеры ESC
Недавно на рынке появились электродвигатели для гоночных квадрокоптеров со встроенным в них блоком регулятора ESC, например, модель ZWW Black Widow. На первый взгляд, это может показаться очень удобным и компактным техническим решением, но сама идея довольно спорная. Дело в том, что в случае неисправности двигателя или блока ESC заменить придется оба сразу. В итоге это будет значительно дороже.
Вторая проблема заключается в невозможности обновить или заменить по отдельности двигатель или ESC, при появлении такой необходимости. Бывают ситуации, когда для различных условий оптимально применение нескольких типов двигателей, но интегрированная конструкция неизбежно приводит к потере гибкости.
Контроллеры ESC «4-в-1»
Очень удобный и практичный вариант — это «4-в-1» регулятор ESC, который состоит из четырех отдельных ESC, встроенных в одну плату того же размера, как полетный контроллер или распределительная PDB. Все три этих блока можно соединить вместе в один пакет, практически отказавшись от проводов.
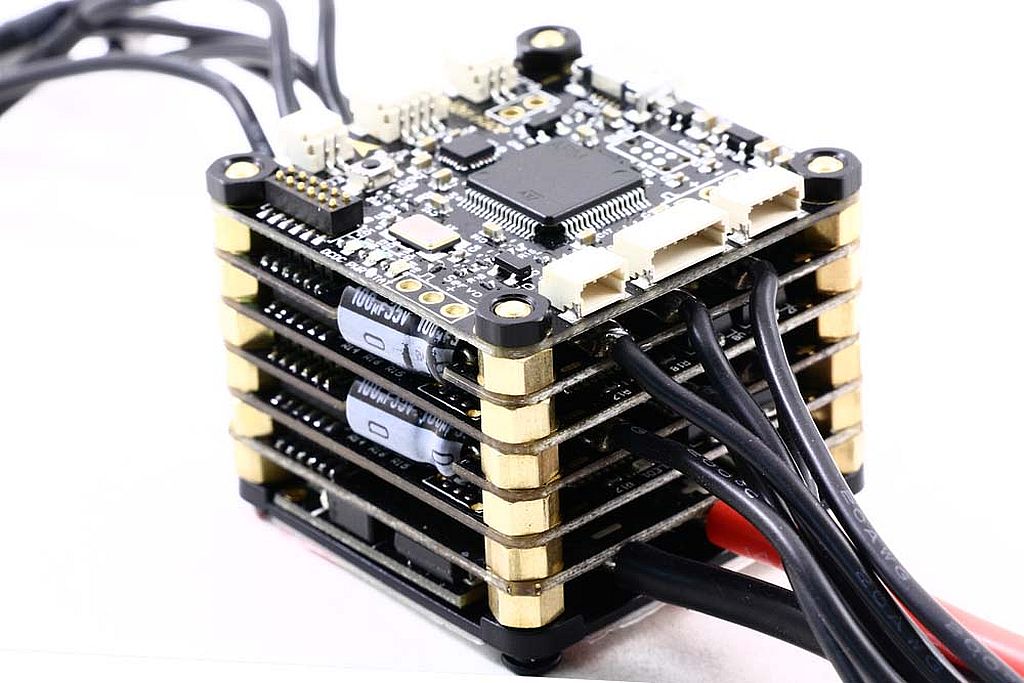
Однако повреждение одного из ESC означает выход из строя всей платы. Это естественный компромисс между риском и удобством. Для борьбы с ним некоторые производители применяют схему компоновки из 4 отдельных ESC, которые встраиваются в общий стек, чтобы сформировать единую плату. Так сделано, например, в устройстве ESC XRacer Quadrant 4-in-1, имеющем большое преимущество с точки зрения распределения веса, потому что масса централизована, а мини-квадрокоптер обладает меньшим моментом инерции и лучшей отзывчивостью.
Зависимость тяги от выбора ESC
Некоторые контроллеры ESC могут обеспечить больше тяги, чем другие, при условии одинаковой настройки (тот же двигатель, пропеллер, напряжение). Погрешность в тяге у различных моделей может достигать 20%. Однако это не указывает на качество регулятора ESC, которое может зависеть от многих других факторов: уровень сборки, долговечность, поддерживаемый диапазон напряжений, плавность, уровень электрических шумов и многое другое.
Правильный выбор всегда зависит от того, что вы хотите получить в результате. На практике, все последние модели ESC, выпускаемые известными брендами, имеют отличную мощность и работают очень точно.
Автоматический и фиксированный тайминг
Традиционно используемые в KISS ESC и BLHeli ESC метод автоматической синхронизации и фиксированный тайминг являются двумя принципиально разными подходами к управлению двигателями квадрокоптеров. Они имеют довольно сильное влияние на производительность и надежность регуляторов скорости, но требуют отдельного обсуждения.
Если не вдаваться в сложные технические моменты, для начинающих вполне достаточно знать, что большинство современных электродвигателей для квадрокоптеров прекрасно работают как с автоматической синхронизацией, так и при среднем значении выставленного фиксировано тайминга. Но единого решения на все случаи жизни не существует и самым правильным будет проведение полетных тестов.
Загрузчик bootloader
В те времена, когда у прошивки контроллера ESC существовало множество различных параметров настройки, загрузчик был очень важной частью регулятора скорости. Он представлял собой небольшую программе, которая установлена на ESC, чтобы можно было легко получить доступ к его настройкам.
Теперь в этом пропала необходимость и даже не требуется знать, что такое загрузчик. Дело в том, что современные контроллеры ESC почти всегда поставляются с прошивкой BLHeli и загрузчиком BLHeli. Пользователям обычно не нужно беспокоиться об этом, но есть информация, которая может оказаться полезной:
Без загрузчика можно только прошивать firmware или изменять конфигурацию ESC, подключаясь непосредственно к микропроцессору. Но также есть возможность установить свой bootloader и воспользоваться им при необходимости.
У программного обеспечения SimonK и BLHeli есть собственные загрузчики. Bootloader BLHeli предлагает больше возможностей и чуть более гибкий, что упрощает настройку. Первоначально весь софт загружался в ESC через сигнальный провод, используя 1-проводной интерфейс, но совсем недавно появился и стал популярным вариант, использующий полетный контроллер для перепрограммирования.
Популярные бренды регуляторов ESC
Если регулятор скорости изготовлен известной компанией, вкладывающей большие средства в исследования, проектирование и испытание своей продукции, соблюдая при этом технологическую дисциплину, то качество приборов практически всегда остается на высоте. Рекомендовать кого-либо одного будет несправедливо, но можно перечислить имена основных игроков на этом рынке. Они даны в алфавитном порядке, без комментариев и указания конкретных преимуществ или недостатков:
- Aikon
- Armattan
- Castle
- DYS
- EMAX
- Favourite
- FPVModel
- Gemfan
- KISS
- Lumenier
- Racerstar
- Rotorgeek
- Sunrise
- TBS
- T-Motor
- Turnigy
Приобретая одну из моделей этих производителей, при условии ее подлинности, вы, скорее всего, не ошибетесь.