

Мини квадрокоптеры — это увлекательная техническая новинка, которая может использоваться для гонок, развлечений, как отличная платформа для полётов с видом от первого лица (FPV), потокового видео или аэрофотосъёмки. Если вы только начинаете интересоваться дронами, планируете собрать свой первый самостоятельно или купить готовый, полезно знать из чего они состоят и для какой цели нужен каждый отдельный компонент.
Эта статья — небольшой учебник по устройству квадрокоптеров. Начинающим пилотам такое краткое руководство просто необходимо. Поверьте, без этого будет сложно двигаться дальше. Вот о чём мы расскажем:
- Что такое квадрокоптер?
- Как и почему он летает?
- Из каких частей состоит и зачем они нужны?
Что такое квадрокоптер
Квадрокоптер — это разновидность многовинтового вертолёта с четырьмя роторами и беспилотный летательный аппарат, управляемый по радио. Он похож на вертолёт по принципу работы. Но из-за особенностей конструкции, квадрокоптеры более экономичны и намного проще в изготовлении, особенно небольшого размера. За счёт устойчивости и высоких лётных характеристик, их часто применяют для таких задач, как наблюдение с воздуха и аэрофотосъёмка.
.jpg)
Размеры квадрокоптера могут быть различными — от умещающихся на ладони аппаратов весом в несколько грамм, до очень серьёзных машин, способных поднять в воздух пассажира.

Как летает квадрокоптер
У обычного вертолёта есть главный ротор, вращение которого обеспечивает подъёмную силу и небольшой хвостовой винт для компенсации аэродинамического крутящего момента, создаваемого несущими лопастями. Без него вертолёт не может лететь вперёд и будет вращаться так же быстро, как основной винт, но в противоположную сторону.

В отличие от вертолёта, квадрокоптер имеет четыре винта, работающих одновременно, чтобы создать направленную вверх тягу. Каждый из этих пропеллеров обеспечивает четверть необходимой подъёмной силы. Поэтому можно использовать менее мощные двигатели, которые намного дешевле. Направление движения контролируется изменением тяги каждого из роторов.
Винты квадрокоптера обычно расположены по квадрату. Два, находящиеся на противоположных сторонах квадрата, вращаются по часовой стрелке, а другие два в противоположном направлении. Если все роторы повернутся в одном направлении, летательный аппарат станет вращаться точно так же, как обычный вертолёт без хвостового ротора.
Чтобы балансировать в воздухе и сохранять горизонтальное положение, квадрокоптер должен постоянно контролировать состояние гироскопических датчиков уровня и корректировать скорость вращения каждого из роторов. Обычно это делается автоматически с помощью сложной системы управления на основе ПИД-регулятора. Качество работы компьютерного пропорционально-интегрально-дифференциального регулятора является основой любого дрона, обеспечивает его устойчивость и лётные характеристики.

Подобно птице, самолёту или вертолёту, квадрокоптер имеет три дополнительных степени свободы. Это описанные ещё в XVIII веке Леонардом Эйлером углы тангажа, крена и рысканья (pitch/roll/yaw), которые определяют любое перемещение в трёхмерном пространстве.
Когда ориентация беспилотника меняется по любой из осей, гироскопы показывают угловое отклонение от начальной позиции. Бортовой компьютер запоминает исходное положение летательного аппарата и при помощи программного ПИД-регулятора управляет моторами для того, чтобы вернуть дрон в это исходное положение равновесия.
Если квадрокоптер уравновешен, можно свободно изменять его положение в пространстве. Например, для создания крена или тангажа тяга одного из четырёх роторов уменьшается, а противоположного — увеличивается на ту же величину. Это заставляет аппарат наклоняться.

При наклоне вектор тяги роторов имеет горизонтальную и вертикальную составляющие. Это приводит к двум вещам:
- квадрокоптер движется в направлении, противоположном горизонтальной составляющей тяги;
- поскольку вектор тяги разделен, его вертикальная составляющая стала меньше и аппарат начинает терять высоту.
Чтобы дрон не упал при крене или тангаже, необходимо увеличить тягу каждого ротора для компенсации снижения. Изменения по каждой из степени свободы, должны быть скоординированы для движения в нужном направлении.
Все это делается автоматически с помощью полётного контроллера. Единственное, что требуется от пилота — передать по радио команду, в каком направлении развернуться и куда лететь. Более совершенные беспилотники, кроме радиоуправления, оснащают системой навигации GPS и могут летать на автопилоте.
Основные узлы и компоненты квадрокоптера
Чтобы понимать устройство квадрокоптера, нужно разобраться с его основными составными частями и тем, как они связаны между собой и совместно работают. Их немного:
- Рама (frame) — несущая конструкция, объединяющая все остальные компоненты. Она сделана так, чтобы совмещать в себе механическую прочность, жёсткость на изгиб и небольшой вес.
- Двигатели. В конструкции дронов применяются бесщеточные или обычные коллекторные моторы постоянного тока. Их задача — обеспечить необходимую тягу для подъёма летательного аппарата.
- Электронные регуляторы скорости (ESC) для управления вращением двигателей, по одному ESC на каждый мотор.
- Пропеллеры — пластиковые или деревянные воздушные винты, вращающиеся на валу двигателей.
- Аккумуляторы — источник питания для силовой установки квадрокоптера и электронного оборудования.
- Полётный контроллер — мозг беспилотника, координирующий работу всех узлов и агрегатов.
- Приёмник и передатчик аппаратуры радиоуправления.
- Различные дополнительные элементы, в зависимости от назначения дрона.
Рама
Рама представляет собой каркасную структуру или скелет, который объединяет все компоненты. Обычно это плоская пластина с расходящимися в стороны лучами. Рамы, чаще всего, изготовлены из углеволокна, листового алюминия, прочного пластика или дерева. Они обладают высокой ударной прочностью и должны минимизировать возникающие вибрации.

Стандартная рама квадрокоптера состоит из следующих частей:
- центральная пластина, на которой установлена электроника;
- четыре кронштейна, прикреплённых к центральной пластине, которые называют стрелами.
Технологии и материалы для изготовления:
- фрезеровка из листового углеволокна;
- штамповка или лазерная резка из алюминия;
- изготовление из листовых материалов на основе древесины, таких как фанера или МДФ;
- литье под давлением из термопластика;
- метод 3D-печати, такой как PLA.
Углеволокно является самым популярным материалом для изготовления рамы благодаря прочности, высокой жёсткости и малой массе. Для обработки листового материала используют фрезерные станки с программным управлением, обеспечивающие высокую точность.
Для крупных моделей используют алюминиевый профиль относительно небольшого веса и высокой жёсткости. Он вполне доступен по цене, но дюралевая рама плохо гасит вибрацию двигателей, что является серьёзной проблемой для датчиков гироскопов.

Рамы из древесных материалов, таких как фанера или МДФ, легко сделать самостоятельно. Они лучше поглощают вибрации, чем алюминий. К сожалению, древесина не очень жёсткий материал и легко ломается при авариях.
Размер рамы квадрокоптера обычно обозначается как расстояние между осями расположенных диагонально моторов. Такая «колёсная база» определяет максимальный размер винтов, которые можно установить на дрон. Должно остаться достаточно места между вращающимися пропеллерами и оборудованием, чтобы они не мешали друг другу. Полное руководство по выбору рамы для гоночного квадрокоптера можно найти здесь.
Двигатели
Двигатели квадрокоптера — это электромоторы постоянного тока. Они могут быть двух типов — обычные коллекторные и бесщеточные. В недорогих дронах применяются более лёгкие щёточные модели, которые меньше весят, работают на более низких мощностях и значительно дешевле. Их приходится чаще менять, потому что они имеют меньший срок службы.

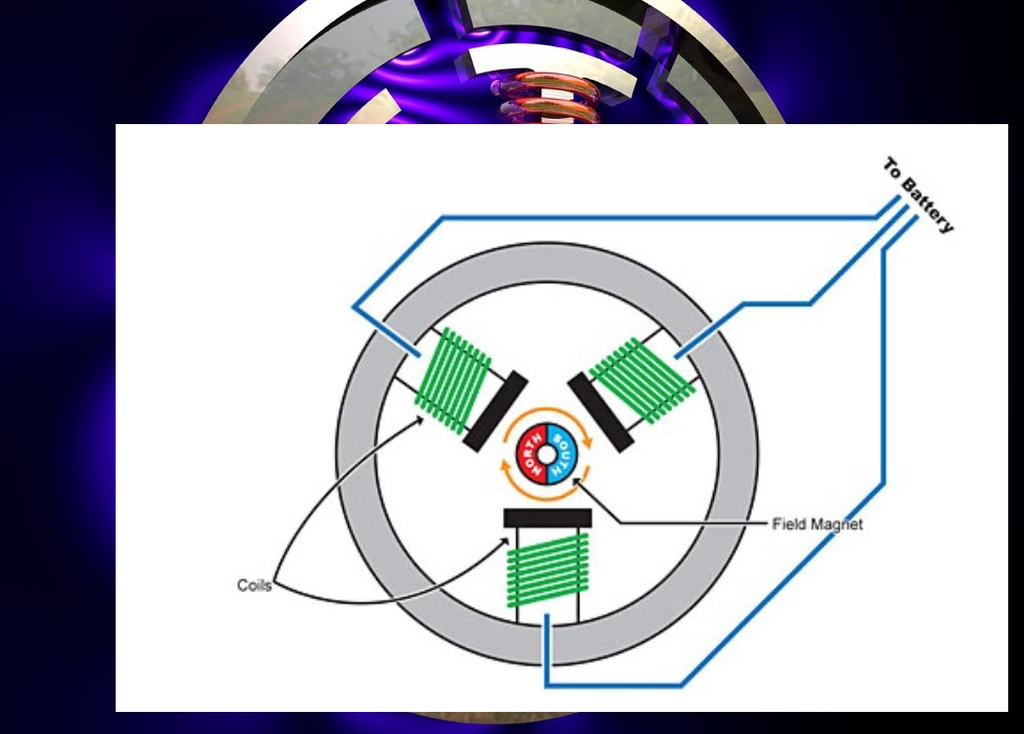
Бесщеточный мотор похож на обычный двигатель постоянного тока. Его вал тоже приводится во вращение при взаимодействии обмотки и постоянных магнитов. Но у этого двигателя отсутствуют щётки на валу, которые переключают направление питания в катушках. Вместо этого, есть три катушки на внутреннем вращающемся сердечнике, который крепится к основанию.
Снаружи имеется несколько магнитов, установленных на цилиндр, который прикреплён к вращающемуся валу. Таким образом, катушки жёстко закреплены и провода присоединяются непосредственно к ним, а необходимости в скользящих щётках нет. Нет потерь энергии, а большие обороты достигаются при меньшем расходе мощности. Бесколлекторные двигатели значительно эффективнее и надёжнее.
В продаже есть много различных моделей электродвигателей, которые различаются по размеру и потреблению энергии, качеству и стоимости. При выборе подходящего именно для вашего квадрокоптера, нужно также учитывать его вес, грузоподъёмность и используемый размер пропеллеров. О том как правильно подобрать двигатель, можно почитать здесь.
Пропеллеры
Вращающиеся винты создают тягу квадрокоптера, без которой невозможен полет. Они обычно изготавливаются из прочного пластика, иногда из углеродного волокна или даже из дерева.

Несмотря на кажущуюся одинаковость, четыре винта квадрокоптера на самом деле разные. Если внимательно присмотреться, направление лопастей двух из них одних отличается от остальных. Это связано с тем, что половина из роторов дрона всегда вращается в противоположном направлении.
В продаже есть воздушные винты разного диаметра и с различным шагом (pitch). При выборе обязательно нужно учитывать размер рамы квадрокоптера и конкретную модель применяемых двигателей. Более подробно о выборе пропеллеров для гоночного квадрокоптера.
Электронный регулятор скорости
Электронный регулятор скорости ESC — это устройство, которое контролирует частоту оборотов бесщеточного двигателя квадрокоптера на основании команд, полученных от полётного контроллера. На каждый мотор используется по отдельному регулятору. Для обычных коллекторных матовых моторов ESC не требуется. Для управления ими достаточно обычных мощных транзисторов, которые встраивают прямо в контроллер.

Бесщеточные двигатели являются многофазными, поэтому прямое питание постоянного тока для них не подходит. Блок ESC постоянно генерирует три высокочастотных сигнала с разными, но контролируемыми фазами, чтобы обеспечить вращение вала. Наиболее важным фактором при выборе ESC является максимальный коммутируемы ток.
Полётный контроллер
Полётный контроллер (flight controller) является мозгом квадрокоптера. Он состоит, в самом простом варианте, из микропроцессора (CPU) и электронного датчика инерции, который также обозначают сокращением IMU (Inertial Measurement Unit).

IMU — это электронный сенсор, который измеряет скорость, направление движения и ускорение квадрокоптера. Полученные от него данные позволяют управляющей электронике рассчитывать команды для изменения скоростей вращения двигателя. Типичный датчик IMU обычно содержит гироскоп и акселерометр.

Акселерометр измеряет ускорение, а также направление силы тяготения, для определения верха, низа и уровня авиагоризонта. Поскольку акселерометр оснащён трехосевым датчиком, он помогает определить ориентацию беспилотника относительно поверхности Земли.
Гироскоп измеряет угловую скорость движения, с которой происходит вращение вокруг трёх осей. Как помните, это углы тангажа, крена и рысканья (pitch/roll/yaw), о которых рассказывалось в начале статьи.
В продаже есть большое число полётных контроллеров для всех моделей дронов, с разными техническими характеристиками и вариантами прошивок. Они вполне доступны и стоят от десяти до нескольких сотен долларов. Но если есть желание и любовь к экспериментам, можно попытаться построить собственный, например, на плате Arduino. Это непростое, но очень увлекательное занятие для настоящего гика.
Радиоуправление
Квадрокоптер управляется по радио с помощью радиопередатчика (TX), а радиоприёмник (RX) — это небольшое бортовое устройство, которое получает от него команды. На основании этих команд полётный контроллер управляет электромоторами, чтобы аппарат поднимался в воздух, летел в нужном направлении или снижался. Дополнительные каналы используют для контроля за поворотом видеокамеры, изменением угла зрения и точной настойки фокуса.

Передатчики и приёмники для радиоуправления работают в строго выделенном для этого диапазоне. Это популярная полоса так называемых гражданских частот 2.4GHz, которая применяется для адаптеров Bluetooth, сетей WIFI и в бытовых микроволновых печах. Для неё не требуется получать специального разрешения. За счёт небольшой мощности передатчика и специального кодирования, несколько радиоуправляемых систем 2,4 ГГц могут работать одновременно, не создавая помех друг другу.
Аккумулятор
Литий-полимерные аккумуляторы LiPo являются основным источником питания квадрокоптеров. Технология LiPo используется из-за высокой плотности энергии (ёмкости на единицу веса) и большой разрядный ток. Все батареи LiPo рассчитаны на определённый номинал напряжения, который зависит от количества элементов, ёмкость и скорость разряда.

Для правильной эксплуатации литий-полимерных аккумуляторов используются специальные зарядные устройства, которые имеют электронное управление. Это связано с необходимостью точной балансировки каждого из элементов питания в комплекте, чтобы они имели одинаковое напряжение. Без хорошей балансировки LiPo батареи не выдерживают высоких нагрузок и разрушится. Неправильно заряженный аккумулятор может даже взрываются или загореться во время полёта.

Камера FPV
Камера FPV позволяет пилоту квадрокоптера использовать специальные очки (goggles) и наблюдать за полётом аппарата от первого лица. На FPV дронах часто устанавливают сразу две камеры — одну для потоковой передачи в реальном времени, а другую для записи кадров с качеством HD.

Камеры FPV могут иметь не слишком высокое качество видео. Они предназначены для широкого динамического диапазона и должны работать с малыми задержками. Это чрезвычайно важно для полётов на высокой скорости.
Дополнительные компоненты
Дополнительные компоненты для квадрокоптеров — это GPS-модули, ультразвуковые датчики, барометры, стабилизированные подвесы для камер (Gimbal) и многое другое. Они могут повысить качество вашего беспилотника, принести больше возможностей и сделать его более совершенным. Планируя их использование, необходимо убедиться, что полётный контроллер поддерживает все эти дополнительные аппаратные средства.

Возможные усовершенствования:
- Модуль GPS взаимодействует с навигационными спутниками и получает от них точную информацию о местоположении. Её можно использовать для расчёта скорости и пути. GPS необходим для автономных полётов на дальние расстояния.
- Ультразвуковой датчик измеряет расстояние между ним и землёй, то есть определяет высоту. Это полезно, если вы хотите, чтобы ваш квадрокоптер самостоятельно держался на определённом расстоянии от земли без ручного управления или умел облетать препятствия.
- Работа сонара невозможна на большом расстоянии, поэтому для высотных полётов лучше подходит барометрический датчик. Он точно измеряет влажность и давление воздуха. Но когда беспилотник находится близко к земле, эти факторы меняются слабо. Поэтому рекомендуется использовать барометр и ультразвуковой высотомер одновременно.
- Несмотря на установку различных демпферов, во время полёта квадрокоптер испытывает значительные вибрации и подвержен влиянию ветра. Чтобы получить хорошие кадры видео, необходимо стабилизировать камеру. Для этой цели используются специальные моторные подвесы с компьютерным управлением.
В этом списке далеко не все, что можно добавить для улучшения беспилотника. Совершенству, как известно, нет предела.
Заключение
Вероятно, эта статья дала вам некоторое представление о том, как устроены квадрокоптеры и какое оборудование находится у них внутри. Чтобы помочь узнать больше о полётах на этих замечательных беспилотниках, мы будем регулярно публиковать отдельные руководства не только для начинающих, но и более опытных конструкторов и пилотов.
Пожалуйста, не стесняйтесь писать свои комментарии или задавать вопросы по этой статье. По плану, следующий материал будет посвящён программному обеспечению квадрокоптеров.